| Модуль |
Имя |
Версия |
Лицензия |
Источник |
Языки |
Платформы |
Тип |
Автор |
Описание
|
| Sockets |
Сокеты
|
5.1 |
GPL2 |
tr_Sockets.so |
en,uk,ru,de,pt |
x86,x86_64,ARM
|
Transport |
Roman Savochenko
Maxim Kochetkov(2014), Maxim Lysenko (2009-2010) — this page initial translation |
Provides sockets based transport. Support network and UNIX sockets. Network socket supports TCP, UDP and RAWCAN protocols.
- - append of support AF_BLUETOOTH sockets for direct requesting BLE devices.
|
Модуль предоставляет в программу поддержку транспортов, основанных на сокетах. Поддерживаются входные и выходные транспорты, основанные на сетевых сокетах TCP, UDP, UNIX и RAWCAN.
Добавить новые входные и выходные сокеты можно посредством конфигурации транспортной подсистемы в любом конфигураторе OpenSCADA.
1 Входные транспорты
Сконфигурированный и запущенный входной транспорт открывает серверный сокет для ожидания соединения клиентов, кроме инициативного подключения. В случае с UNIX сокетом создаётся файл UNIX сокета. Сокеты TCP и UNIX являются многопоточными, т.е. при подключении клиента к сокетам данных типов создаётся клиентский сокет и новый поток, в котором производиться обслуживание клиента. Серверный сокет, в этот момент, переходит к ожиданию запросов от нового клиента. Таким образом достигается параллельное обслуживание клиентов. RAWCAN сокет осуществляет прием CAN кадров из интерфейса согласно настроенному фильтру.
Each input transport is associated with one or several available transport protocols, to which input messages are transmitted. Together with the transport protocols, the mechanism of combining fragmented pieces when sending requests is supported.
Read about the passive acquisition mechanism and initiative connections you can in the corresponding part of the "Data acquisition in OpenSCADA" document.
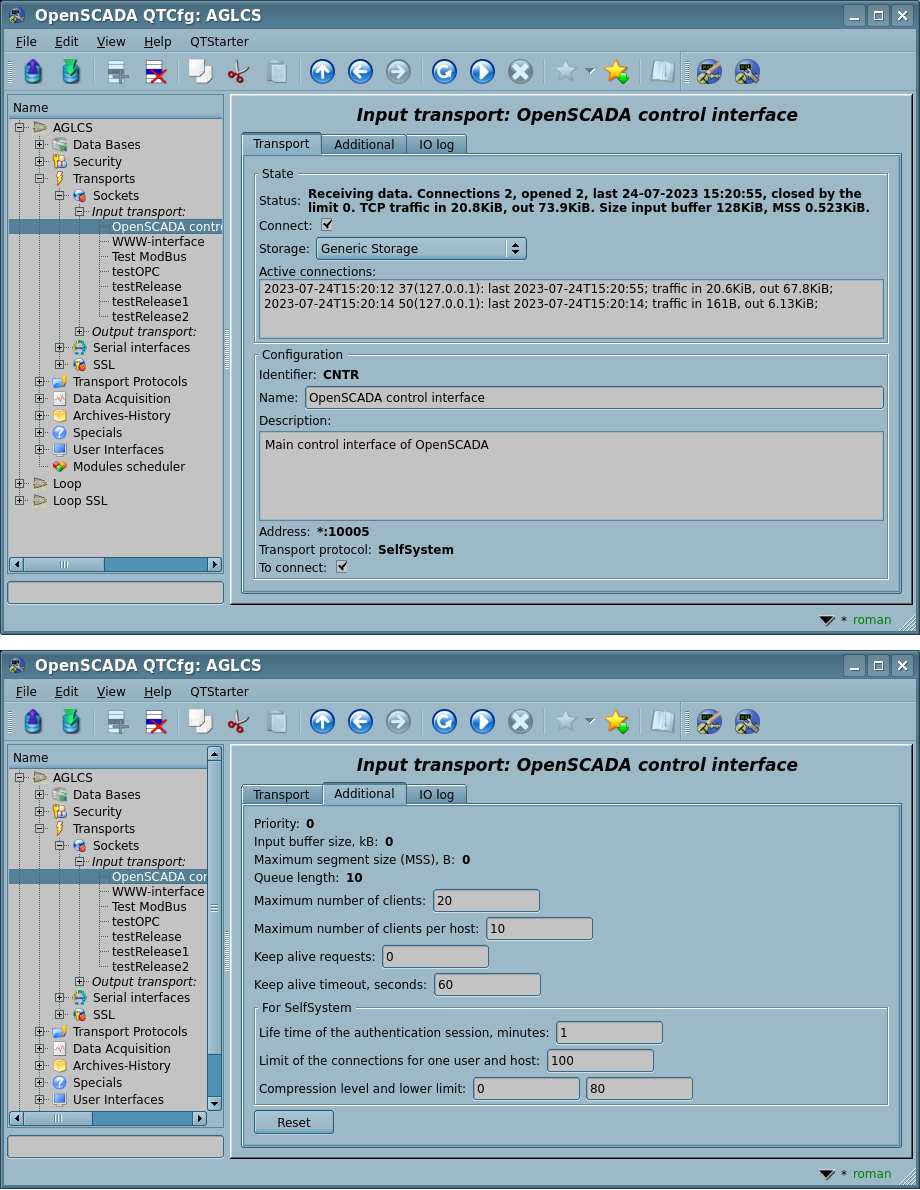
Fig.1. The generic configuration dialogues of the input socket.
Using the main dialog you can set:
- State of the transport, that is: status, "Connect", name of the storage (containing the configuration) and information about the active connections.
- Identifier, name and description of the transport.
- Address of the transport. The format of the address is listed in the table below.
- Selecting of the transport protocols.
 Empty value of the protocols selection switches the transport mode to creating the associated output transports for each connection ID read from to that input.
Empty value of the protocols selection switches the transport mode to creating the associated output transports for each connection ID read from to that input.
- State "Connect", in which the transport must be switched at start up.
Using the additional dialog you can set:
- Priority of the transport tasks.
- [TCP] System input buffer size in kilobytes of the socket. Set to 0 for disabling the user size. Actual size you can see in the status.
- [TCP] Maximum segment size (MSS) in bytes, for limit the transmitted packages size (segments TCP) on bad link channels. Set to 0 for disabling the user limit for size. Actual size you can see in the status.
- [TCP|UNIX|RAWCAN] Queue length of the sockets
- [TCP|UNIX|RAWCAN,!INIT] Maximum number of clients and Maximum number of clients per host.
- [TCP|UNIX|RAWCAN,!INIT] Keep alive requests — closing the connection after specified number of the requests. Zero value for disabling — never closes.
- [TCP|UNIX|RAWCAN] Keep alive timeout, seconds — closing the connection after missing requests within a specified time. Zero value for disabling — never closes.
- Disabling this feature is not recommended because the TCP/IP network property does not guarantee the server notification about the disconnection, say in the event of a power failure on the client. As a result, the opened client connections can remain forever, and when the limit is reached the server will stop accepting new ones!
- [TCP,INIT|ASSOC] Timeouts, tries of the initiative connection and the associated output transports, empty for default and separated by '||'. Format of the timeouts and tries is corresponded to ones of the output transport.
- Protocols' specific custom parameters.
- Reset all the additional parameters to default values and cleanup the protocols' specific custom parameters.
Features of the formation of the input socket address are given in the table below:
| Socket type |
Address
|
| TCP |
[TCP:]{addr}[:{port}[,{port2}[,{portN}]][:{mode}[:{IDmess}]]]
where:
- addr – address for socket to be opened, empty or "*" address opens socket for all interfaces. There may be as the symbolic representation as well as IPv4 "127.0.0.1" or IPv6 "[::1]".
- port, port2, portN – network ports on which the socket is sequential opened (at busy the first ones), indication of the character name of the port, according to /etc/services is available.
- mode – mode of the input socket working:
- 0 — force closing the connection after the session reception-response.
- 1(default) — do not close, only by the KeepAlive parameters.
- 2 — initiative connection. Enables the mode of connecting this input transport to remote host (address instead of local) and switching to the listening state of this host. The "Keep alive timeout" value is used as the timeout of the re-connection of this transport in the absence of activity in order to restore the possibly lost connection.
- IDmess — identification message of the initiative connection — the mode 2.
Example: "TCP::10001:1" — the TCP socket is available on all interfaces, opened on port 10001 and the connection does not break.
|
| UDP |
UDP:{addr}:{port}
where:
- addr — the same as in the TCP;
- port — the same as in the TCP.
Example: "UDP:localhost:10001" — the UDP-socket is only available on the "localhost" interface and opened on the port 10001.
|
| RAWCAN |
RAWCAN:{if}:{mask}:{id}
where:
- if — name of the CAN interface;
- mask, id — mask and identifier of filtering the CAN frames.
Example: "RAWCAN:can0:0:0" — is receiving all CAN frames at the interface "can0".
|
| UNIX |
UNIX:{name}:{mode}
where:
- name — file name of the UNIX socket;
- mode — the same as in the TCP.
Example: "UNIX:/tmp/oscada:1" — UNIX-socket is available through the file "/tmp/oscada" and it doesn't close the connection.
|
RAWCAN имеет некоторые особенности в формировании посылки, а именно:
- идентификатор полученного CAN фрейма помещается в поле отправителя (sender), а данные в поле запроса (request);
- признаком расширенного идентификатора-отправителя является наличие старшего бита (0x80000000).
2 Выходные транспорты
Сконфигурированный и запущенный выходной транспорт открывает соединение с указанным сервером. При разрыве соединения выходной транспорт останавливается. Для возобновления соединения транспорт нужно снова запустить, что все протоколы делают автоматически.
Транспорт поддерживает прямое определение нескольких адресов сервера и обработку всех IP-адресов в которые резолвится символьный адрес, что позволяет строить вертикальное резервирование непосредственно транспортом, который будет автоматически подключаться к первому доступному серверу.
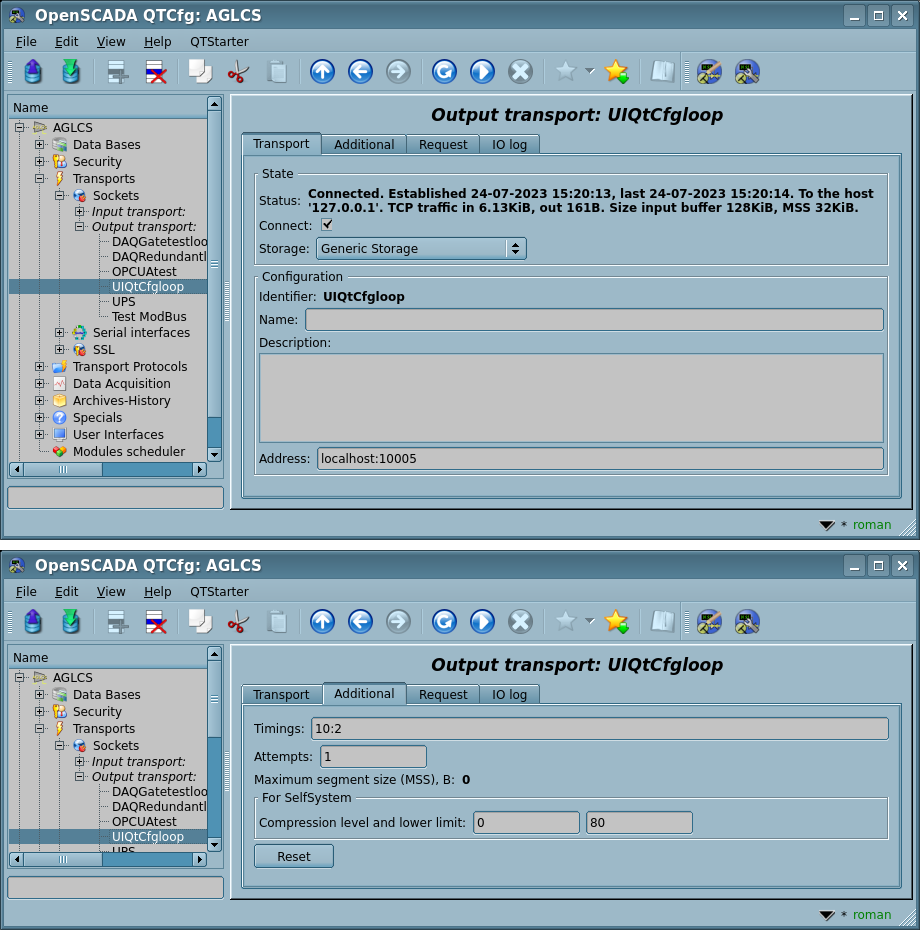
Fig.2. The generic configuration dialogues of the output socket.
Using the main dialog you can set:
- State of the transport, that is: status, "Connect" and name of the storage, containing the configuration.
- Identifier, name and description of the transport.
- Address of the transport. The format of the addresses is listed in the table below.
Using the additional dialog you can set:
- Connection timings in the format "{conn}:{next}[:{rep}]", where:
- conn — maximum connection waiting time, in seconds;
- next — maximum time for waiting the continue of the response, in seconds;
- rep — minimum delay time for next request, in seconds.
- Can be prioritatile specified into the address field as the second global argument, as such "localhost:123||5:1".
- Attempts of the requesting both for this transport and protocol, for full requests.
- Can be prioritatile specified into the address field as the third global argument, as such "localhost:123||5:1||3".
- [TCP] Maximum segment size (MSS) in bytes, for limit the transmitted packages size (segments TCP) on bad link channels. Set to 0 for disabling the user limit for size. Actual size you can see in the status.
- Protocols' specific custom parameters.
- Reset all the additional parameters to default values and cleanup the protocols' specific custom parameters.
Адрес выходных сокетов различного типа формируются следующим образом:
| Тип сокета |
Адрес
|
| TCP/UDP |
[TCP:]{addr}[,{addrN}]:{port}
UDP:{addr}[,{addrN}]:{port}
где:
- addr — адрес к которому осуществляется подключение. Допускаются как символьное, так и IPv4 "127.0.0.1" или IPv6 "[::1]" представление адреса.
- port — сетевой порт к которому осуществляется подключение. Возможно указание символьного имени порта согласно /etc/services.
Пример: "TCP:127.0.0.1:7634" — соединится с портом 7634 на хосте 127.0.0.1.
|
| RAWCAN |
RAWCAN:{if}:{mask}:{id}
где:
- if — имя CAN интерфейса;
- mask, id — маска и идентификатор CAN кадров.
Пример: "RAWCAN:can0:0:0" — принимать все CAN кадры на интерфейсе "can0".
|
| UNIX |
UNIX:{name}
где:
- name — имя файла UNIX сокета.
Пример: "UNIX:/tmp/oscada" — соединится с UNIX-сокетом через файл "/tmp/oscada".
|
RAWCAN имеет некоторые особенности в формировании посылки, а именно:
- отправка CAN фреймов (прозрачно) в транспорт осуществляется в виде структуры struct can_frame. Размер структуры 16 байт, где: 4 байта — идентификатор, 4 байта — длина, 8 байт — данные. Например, посылка: 15 CD 5B 07 08 00 00 00 11 12 13 14 15 16 17 18. Где:
- идентификатор: 123456789 (0x75BCD15) => 15 CD 5B 07, добавить 0x80 в последнем байте если нужен расширенный;
- длина: 08 00 00 00 (восемь байт);
- данные: 11 12 13 14 15 16 17 18.


